Manta-Ray Like Underwater Vehicle “Manta-Bot”
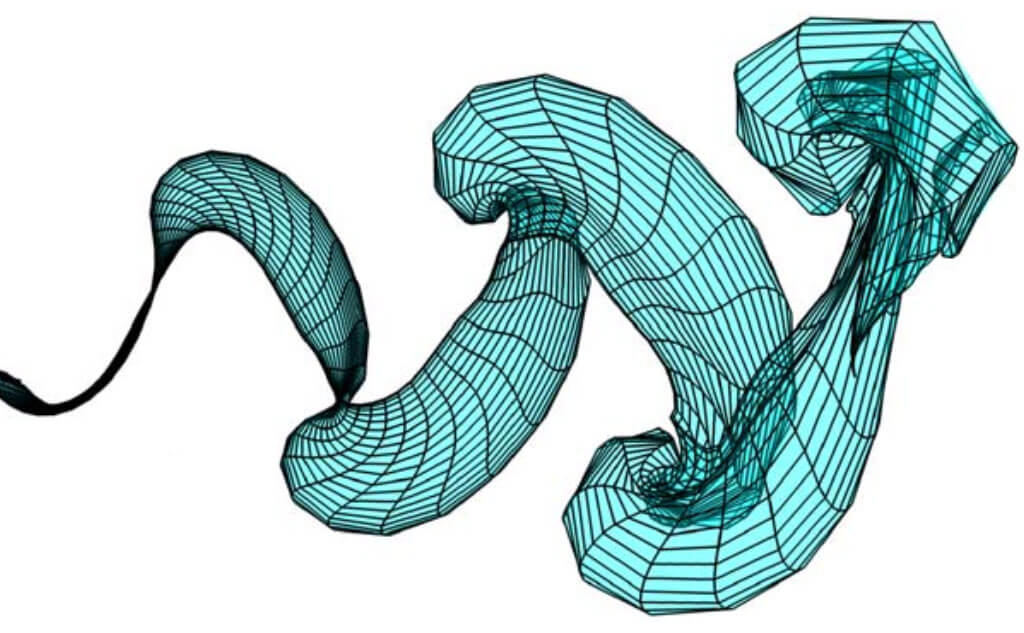
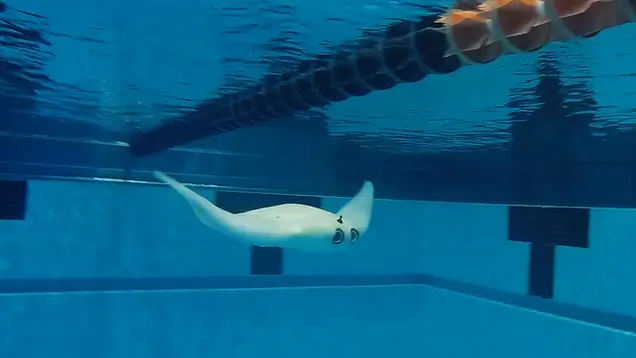
While major bio-inspired underwater vehicles have demonstrated a fish-like swimming pattern (similar appearance, caudal fin propulsion, etc), many of them cannot carry a large load and are unable to achieve sharp maneuvers. We developed a manta-ray-inspired underwater vehicle (manta-bot) that can achieve elegant swimming underwater just like a real manta-ray. With a built-in control system (ROS), […]
Manta-Ray Like Underwater Vehicle “Manta-Bot” Read More »